RepRapPro Huxley
Seite 10: Yeah, Mikrocontroller
Schritt 1: Stromstärke einstellen
- 1x USB-Kabel
- 1x Melzi Ardentissimo Steuerboard
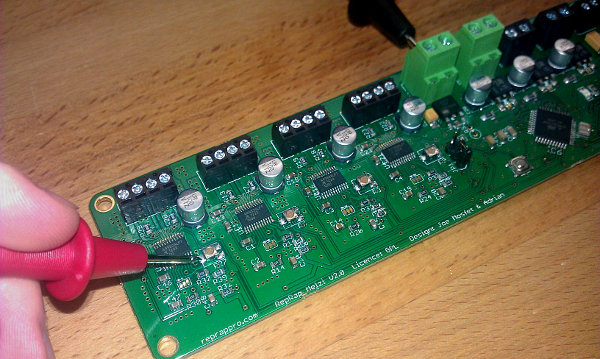
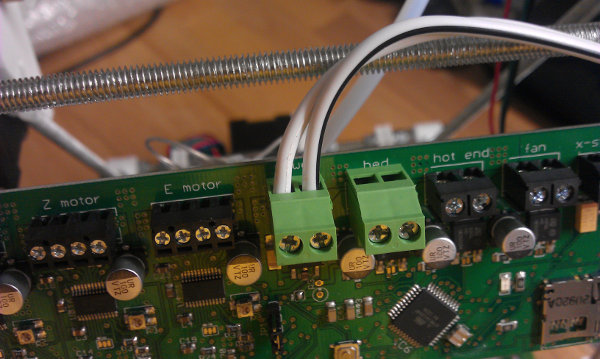
Oder anders gesagt: Uns brennen entweder die Spulen weg oder die Motortreiber (vermutlich zuerst letzteres). Jedenfalls, um dem entgegenzuwirken kann man die Stromstärke variabel einstellen. Dazu befindet sich rechts neben jedem Schrittmotortreiber ein kleines Potentiometer mit dem man die Stromstärke einstellen kann. Damit nichts kaputt geht stellt man den Spannungsbereich zwischen Masse und dem linken Fuß der Potentiometer auf 0,4 bis 0,6 Volt ein (nicht vergessen das Melzi-Board zuerst via USB-Kabel mit Strom zu versorgen). Am Besten ist es, wenn man zuerst den unteren Wert für alle 4 Motortreiber einstellt (0,4 Volt) und erst später bei Druckproblemen (Schrittverluste der Achse, etc.) die Spannung dieser einzelnen Achse erhöht.
Kurz zum Technischen:
Ein NEMA14-Motor hat alle 1,8° eine Wicklung, weshalb man 200 Schritte braucht für eine vollständige Umdrehung. Lustigerweise unterstützen die Treiber sogenanntes Mikrostepping, dabei wird jeder Schritt wiederum in 16 kleinere Schritte unterteilt. Dadurch hat man nicht mehr 200 Schritte pro Umdrehung sondern stolze 3200. Die Motoren lassen sich genauer positionieren, das Anfahren geht sanfter und die Achse fährt weniger „rucklig“. Die Wahrscheinlichkeit, dass Fehler beim Verfahren der Achse auftreten, ist dadurch geringer.
Zudem unterstützt der Treiber ein Positionsfeedback via EMF. Was genau heißt das? Ganz einfach: Die Schrittmotoren werden im Prinzip blind angesteuert: Die Steuerung weiß nicht, ob der Motor gerade wirklich eine Umdrehung gemacht hat oder nicht, da ein Inkremental- oder Absolutwertgeber fehlt. Jede Spule erzeugt aber, wenn sie von Strom durchflossen wird, ein Magnetfeld, welches beeinflusst wird, sobald sich der Motor dreht. Die Schrittmotortreiber können diese Information auswerten und der Steuerung genau sagen, ob sich der Motor jetzt verfahren hat oder nicht. In meiner vorinstallierten Firmware wird diese Funktion leider noch nicht unterstützt, aber wer weiß, eines Tages…
Ein NEMA14-Motor hat alle 1,8° eine Wicklung, weshalb man 200 Schritte braucht für eine vollständige Umdrehung. Lustigerweise unterstützen die Treiber sogenanntes Mikrostepping, dabei wird jeder Schritt wiederum in 16 kleinere Schritte unterteilt. Dadurch hat man nicht mehr 200 Schritte pro Umdrehung sondern stolze 3200. Die Motoren lassen sich genauer positionieren, das Anfahren geht sanfter und die Achse fährt weniger „rucklig“. Die Wahrscheinlichkeit, dass Fehler beim Verfahren der Achse auftreten, ist dadurch geringer.
Zudem unterstützt der Treiber ein Positionsfeedback via EMF. Was genau heißt das? Ganz einfach: Die Schrittmotoren werden im Prinzip blind angesteuert: Die Steuerung weiß nicht, ob der Motor gerade wirklich eine Umdrehung gemacht hat oder nicht, da ein Inkremental- oder Absolutwertgeber fehlt. Jede Spule erzeugt aber, wenn sie von Strom durchflossen wird, ein Magnetfeld, welches beeinflusst wird, sobald sich der Motor dreht. Die Schrittmotortreiber können diese Information auswerten und der Steuerung genau sagen, ob sich der Motor jetzt verfahren hat oder nicht. In meiner vorinstallierten Firmware wird diese Funktion leider noch nicht unterstützt, aber wer weiß, eines Tages…
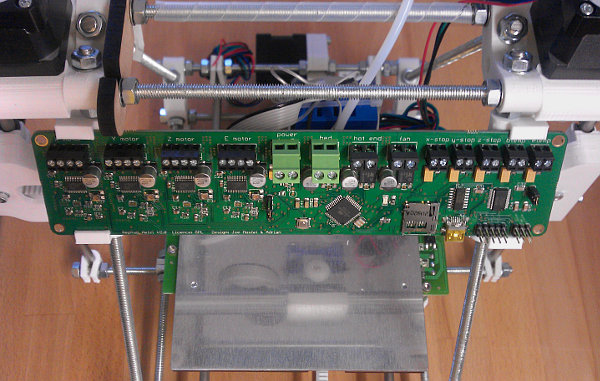
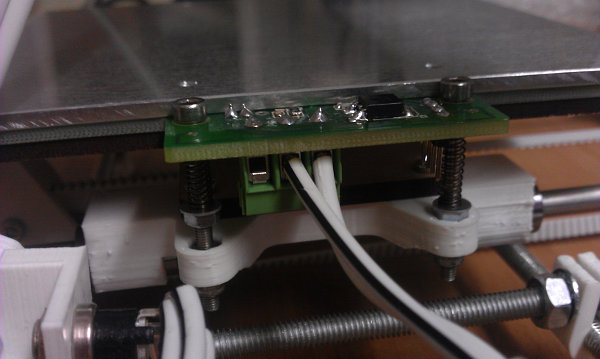
Schritt 2: Steuerboard am RepRap befestigen
- Gedruckte Teile:
- 2x2 PCB-Holder
- 1x Melzi Ardentissimo Steuerboard
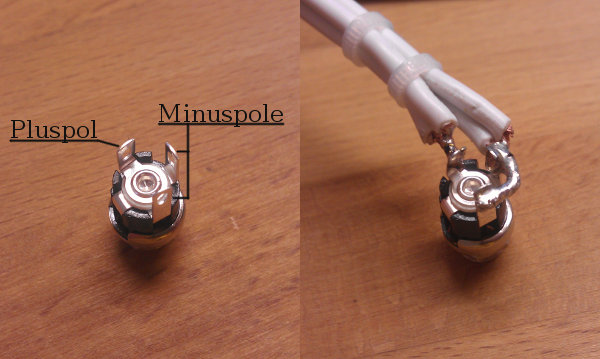
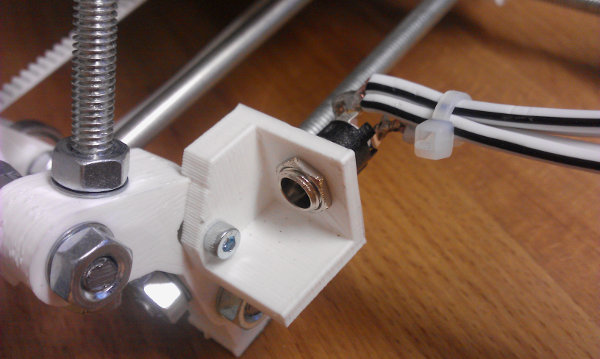
Schritt 3: Die Stromversorgung
- Gedruckte Teile:
- 1x Power-clip
- 1x Buchse für Stromversorgung
- 2x 2-adriges Kabel, ~40cm und ~20cm
- 1x M3x25 Schraube, Tasche 7/20
- 1x M3 Mutter, Tasche 13/20
- 1x M3 Beilagscheibe (gerne auch eine etwas größere), Tasche 15/20

|

|
Revision 8 | 2014-03-20 19:36:09